




Point Cloud 3D Reconstruction
The tradicional 3D reconstruction algorithms receive a stereo image sequence acquired by a calibrated stereo pair and give as output the 3D point cloud from the scene. In this sample, we show a mesh constructed using 3D point clouds obtained through a stereo images captured by ZED Stereo Camera from Stereolabs.
-
Dataset: Sé Velha - University
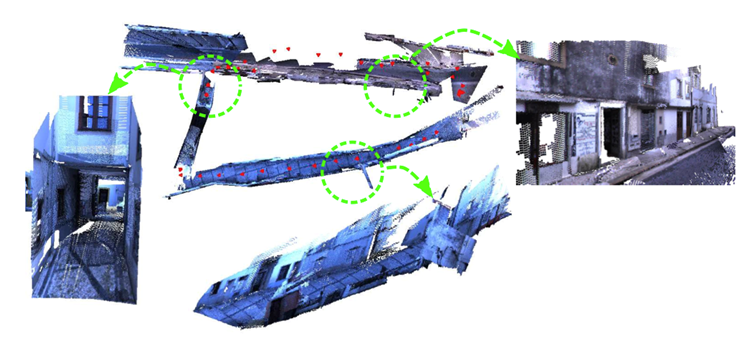
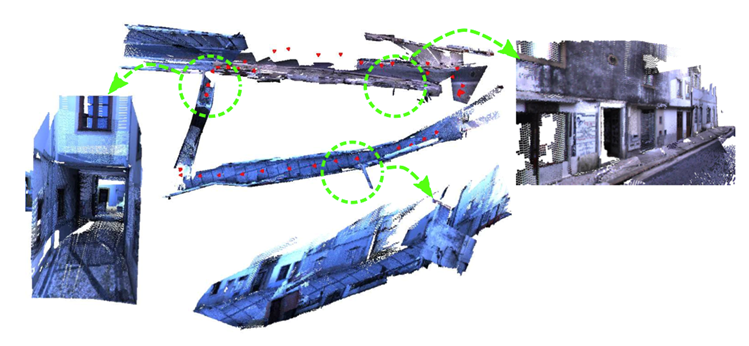
Brief intro of Piecewise Planar 3D Reconstruction
Receiving as input an image sequence acquired by a calibrated stereo pair and outputs the camera motion and 3D planes in the scene.
Current multi-view stereo methods still face difficulties in handling situations of:
- Weak or repetitive texture;
- Variable illumination;
- High surface slant;
Piecewise-Planar Reconstruction (PPR) methods are employed to overcome these issues. This new method is based on planes detection, thus, unlike the 3D Reconstruction methods based on point cloud, we describe a 3D model using much less information. As an example, we take a facade of a building as just a plane (3 XYZ-coordinates) with cloud points methods we would have million points to describe it and three XYZ-coordinate values per single point.
Also, estimating the motion from plane correspondences is advantageous since plane features are much less numerous than point features. Man-made environments are often dominated by large size planes, leading to:
- Fast correspondence and scalability;
- Correspondence across wide baseline images;
- Resilience to dynamic foreground;
Reconstruction Results
- Outdoor Frontal Dataset: Loop in Ladeira do Seminario
- Indoor Bumblebee Dataset: ISR Building Entrance
- Outdoor Bumblebee Dataset: Loop in Condeixa

All images used - Loop in Ladeira do Seminario